NASA'S MSL Rover Prepping for Launch With Four MSSS Cameras Aboard
MALIN SPACE SCIENCE SYSTEMS, INC.
SAN DIEGO, CA 92191-0148
TELEPHONE: (858) 552-2650, EXT. 500
http://www.msss.com/
Contact: Michael Ravine, ravine@msss.com
FOR IMMEDIATE RELEASE: 25 August 2011
NASA'S MSL ROVER PREPPING FOR LAUNCH WITH FOUR MSSS CAMERAS ABOARD
NASA’s next Mars rover, the Curiosity rover of the Mars Science Laboratory Project (MSL), is currently being prepped for its November 25–December 18, 2011 launch window at NASA’s Kennedy Space Center. On board are four Malin Space Science Systems (MSSS) cameras: The 34 mm and 100 mm Mast Cameras (Mastcam), the Mars Hand Lens Imager (MAHLI), and the Mars Descent Imager (MARDI).
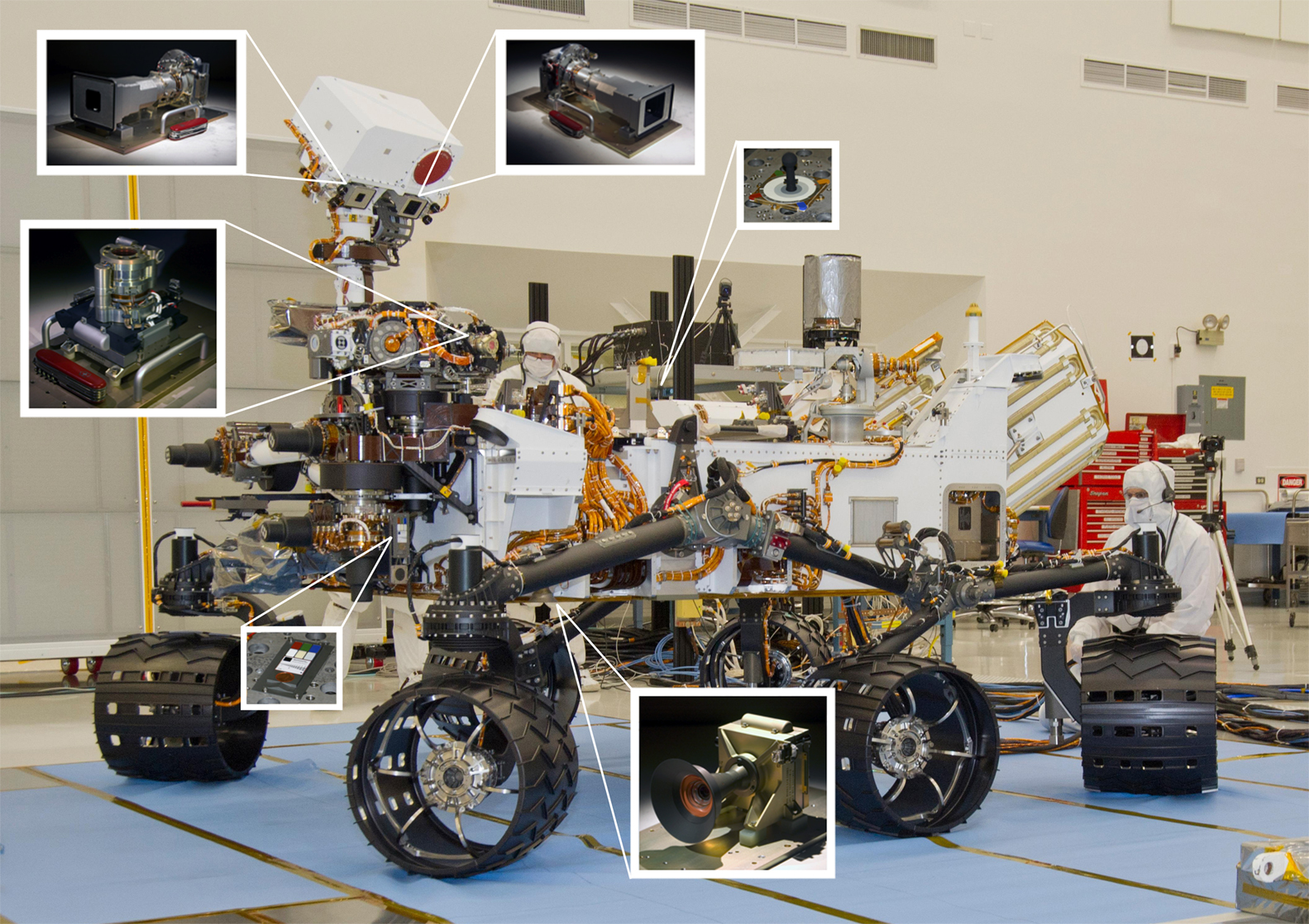 |
| Figure 1. NASA's Mars Science Laboratory rover, Curiosity. Photo was taken during mobility testing on June 3, 2011 inside the Spacecraft Assembly Facility at NASA's Jet Propulsion Laboratory, Pasadena, CA. All six MSSS-constructed pieces of hardware are visible in this image: The two Mastcams and their calibration target, the MAHLI and its calibration target, and the MARDI. Image credit: NASA/JPL-Caltech. |
The Mastcams are designed to be the science imaging “workhorse” for the MSL rover. The cameras, capable of taking full color images analogous to those taken by consumer digital cameras, are mounted on the rover’s remote sensing mast, where they can be panned and tilted to provide image coverage around the rover, both near the rover and out to the horizon. The Mastcams are also capable of acquiring 720p high definition video at a rate of about 7 frames per second, as well as stereo (3D) images of the terrain explored by the MSL rover.
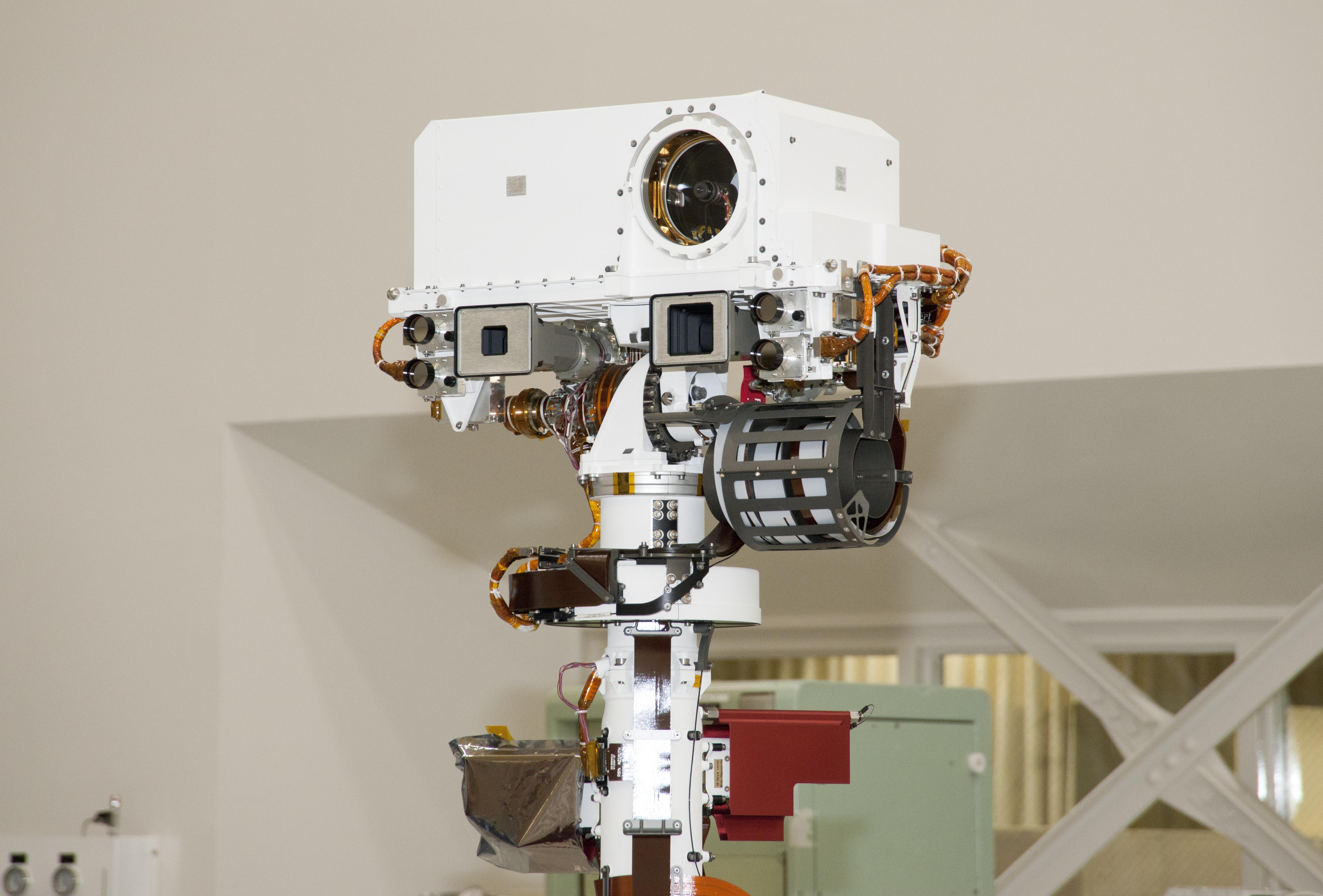 |
| Figure 2. The remote sensing mast on NASA Mars rover Curiosity, taken April 4, 2011, inside the Spacecraft Assembly Facility at NASA's Jet Propulsion Laboratory, Pasadena, CA. The two MSSS-built Mastcams are located beneath the white box at the top of the mast, which houses the ChemCam instrument (built by Los Alamos National Laboratory). For scale, the width of the white box at the top is about 0.4 meter (16 inches). Image credit: NASA/JPL-Caltech. |
The MAHLI is mounted at the end of the rover's robotic arm, and will be used to acquire very high resolution color images of the grain structure of individual rocks. This will help to characterize the geology of the site investigated by MSL, and it will be used to document the materials being examined by MSL’s geochemical and mineralogical experiments. The MAHLI can focus at infinity, allowing for it to be used for inspecting areas on the rover or imaging the local landscape in addition to its microscopic imaging capabilities. The Mastcam and MAHLI mechanisms were developed with MDA Information Systems, Inc., Space Division, in Pasadena, CA.
The MARDI will obtain color images of the martian surface during the descent of the MSL spacecraft to the surface, and may be used during rover traverses to acquire millimeter-scale 3D views of the surface beneath the rover. The descent data will be used very shortly after landing to tell the MSL science team exactly where the rover has landed, and how far away it may be from key geologic features of interest. The images will be used to plan the initial rover traverses, and will provide a profile of the wind encountered by the rover during its descent.
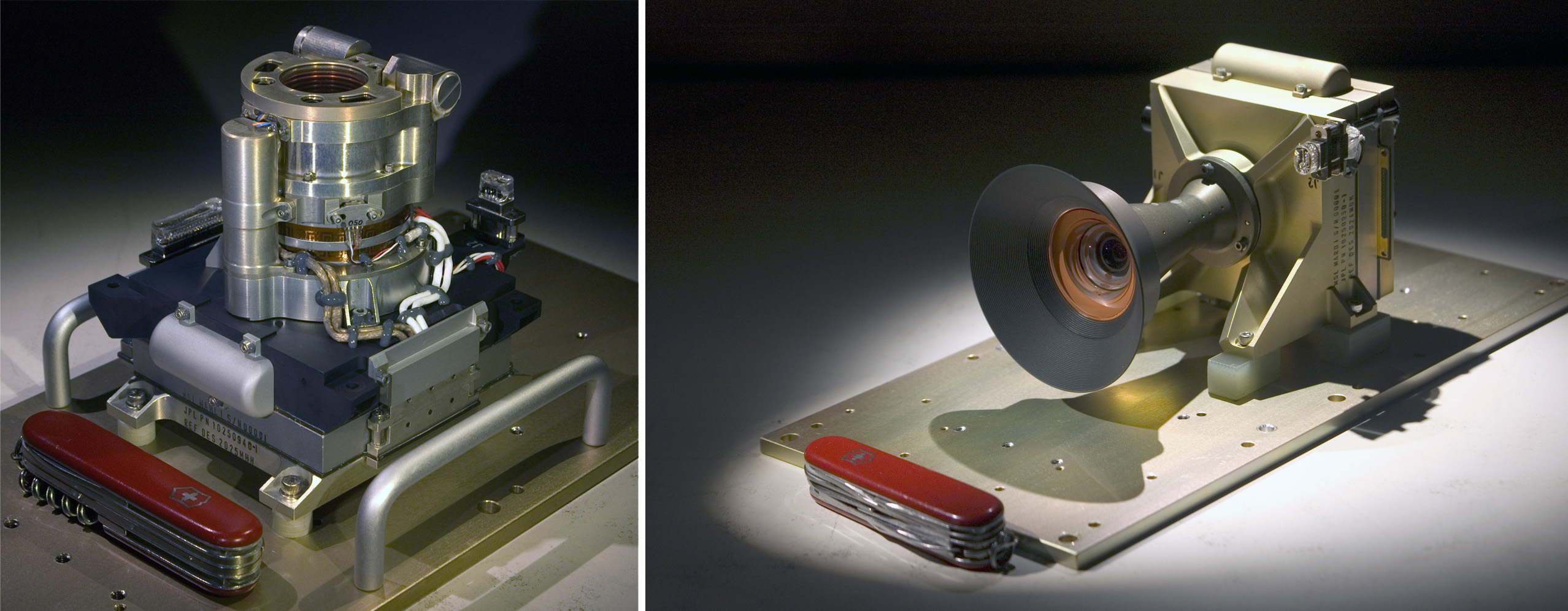 |
| Figure 3. Left: The Mars Science Laboratory (MSL) Mars Hand Lens Imager (MAHLI), which will acquire color close-up images of rocks and surface materials at the MSL landing site at a range of spatial scales with resolution as high as 13.9 micrometers per pixel. Right: The Mars Science Laboratory (MSL) Mars Descent Imager (MARDI), which will acquire hundreds of natural color images at a rate of 4 frames per second during MSL’s descent to the martian surface in August/September 2012. Image credit: NASA/JPL-Caltech/Malin Space Science Systems. |
In addition to the Mastcams, MAHLI, and MARDI aboard the MSL rover, MSSS built and operates the Context Camera (CTX) and Mars Color Imager (MARCI) aboard NASA’s Mars Reconnaissance Orbiter, which has been operating around Mars for over five years. MSSS also built and will be operating the Junocam camera aboard the Juno Mission to Jupiter (launched in August 2011), and is currently working on the Mars Atmospheric Global Imaging Experiment (MAGIE) aboard the joint NASA/ESA ExoMars Trace Gas Orbiter mission, set to launch in 2016. MSSS also built the Lunar Reconnaissance Orbiter Camera (LROC), operated by principal investigator Mark Robinson at Arizona State University, which continues to return 0.25–0.5 meter per pixel high-resolution images and 100 meter per pixel multi-spectral images of the moon after being launched in June 2009.
Other activities of the company are described at www.msss.com.
#####
 |
Subscribe to the Malin Space Science Systems RSS feed to receive news updates.
|


